The recent progress in robot hands is not coming from simply making generalist AI models bigger. The systems showing real gains pair modality-specific AI with tactile and force-aware hardware, because dexterous manipulation fails at the point where vision alone stops being enough.
Why generalist models kept missing the hard part of manipulation
Many vision-language-action systems looked promising until tasks involved contact, timing, or orientation changes. Pouring coffee, rotating an object, or inserting a plug are not mainly recognition problems; they depend on force, slip, motion history, and small corrections made while the hand is already touching something.
RLWRLD’s RLDX-1 is a direct response to that limit. Instead of flattening all inputs into one stream, it uses a Multi-Stream Action Transformer to process vision, torque, tactile signals, and memory separately but jointly, with each modality carrying information the others cannot replace.
That design lines up with RLWRLD’s five dexterity regimes: grasp diversity, spatial precision, temporal precision, contact precision, and context awareness. Contact precision depends on wrist torque and tactile sensing that cameras cannot see, while temporal precision needs multi-frame context to react to moving targets rather than static snapshots, which is why the company also uses cognition tokens to compress visual and temporal information for real-time control across single-arm, dual-arm, and humanoid setups.
Three active routes to better robot hands

The field is now splitting into distinct setup paths rather than one dominant model recipe. That matters for deployment, because each path implies a different data pipeline, hardware bill, and retraining burden.
| Approach | Named example | What it adds | Main constraint |
|---|---|---|---|
| Modality-specific control architecture | RLWRLD RLDX-1 | Combines vision, torque, tactile, and memory for high-DoF hand control | Needs synchronized multi-modal sensing and integration across robot platforms |
| Teleoperation plus learned action prediction | Google DeepMind ALOHA Unleashed | Bi-arm dexterity from teleoperated data and diffusion-based action prediction with fewer demonstrations | Still depends on quality demonstration capture and ergonomic operator setup |
| Simulation-heavy reinforcement learning | Google DeepMind DemoStart | Progressive RL in simulation with over 97% success in real-world multi-fingered tasks using fewer demonstrations | Performance depends on sim-to-real fidelity, especially for contact-rich tasks |
| Sensor-rich hand design | University of Bristol tactile hand | Artificial tactile fingertips with pin-like papillae for manipulation in any orientation | Fabrication, calibration, and durability become part of the software problem |
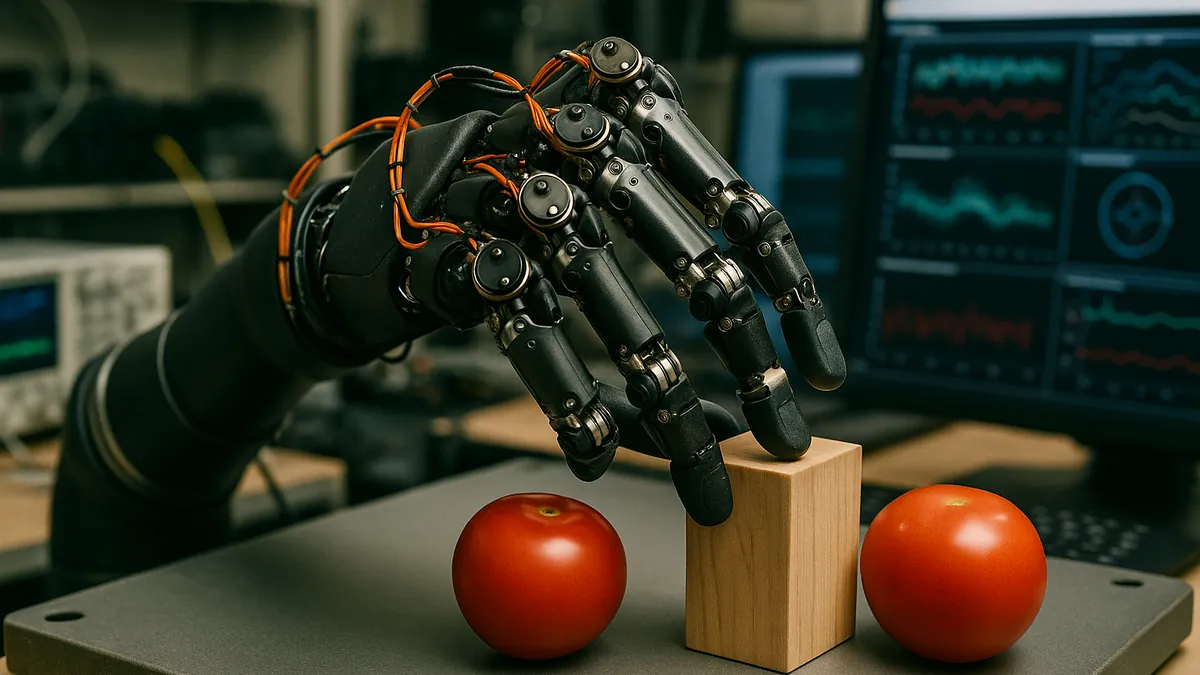
Where the hardware is doing work the model cannot fake
The University of Bristol team makes the clearest case that dexterity is also a hand-design problem. Backed by ARIA’s £57 million Robot Dexterity program, the group built a four-fingered robotic hand with artificial tactile fingertips and pin-like papillae that mimic structures in human skin, allowing manipulation even when the object orientation is awkward or upside down.
That is not just a sensor add-on. Their use of 3D printing across soft and hard materials, with embedded tactile sensing, turns the hand into a tunable interface rather than a fixed endpoint, which changes how quickly teams can iterate on grasp behavior, surface contact, and task-specific designs.
Infrastructure, not just models, sets the deployment pace
Google DeepMind’s ALOHA Unleashed and DemoStart show that training strategy now matters as much as model architecture. ALOHA Unleashed uses teleoperation data and diffusion-based action prediction to support bi-arm tasks such as tying shoelaces and repairing other robots, while DemoStart leans on progressive reinforcement learning in simulation and has reported more than 97% success on real-world multi-fingered tasks including plug-socket insertion.
Those gains still depend on expensive scaffolding. Teleoperation rigs, simulation environments that model contact well enough to transfer, synchronized tactile and torque pipelines, and hardware that can survive repeated training cycles are now part of the AI stack, which is why dexterous manipulation remains harder to industrialize than a benchmark score might suggest.
The next checkpoint is transfer, not one-off demos
The practical test now is whether these systems can carry learned dexterous skills across tasks and hardware without long retraining loops. A hand that works in a lab for one object set is useful research; a hand that keeps precision when tools, surfaces, object weights, and robot embodiments change is a deployment candidate.
That is also where governance and labor questions enter the picture. The NSF-backed HAND ERC is framing robot hands around AI skill libraries and intuitive worker interfaces for manufacturing, caregiving, and other sectors, which shifts the discussion from isolated autonomy demos toward who operates the systems, how skills are transferred, and whether the benefits reach workers rather than only integrators.
For teams evaluating the space, the wrong question is whether a model is bigger than last year’s. The better checkpoint is whether the system combines the right modalities, can tolerate real contact uncertainty, and can be moved to a new task or platform without rebuilding the data and hardware stack from scratch.